Artemis III Moon Landing Mission
Artist’s illustration of Artemis astronauts working on the Moon.
(Photo courtesy of NASA)
Silicon Audio sensors are going to the Moon!
Silicon Audio is excited to formally announce that we were selected to build the seismometer for the Lunar Environment Monitoring Station (LEMS) of Artemis III! The Silicon Audio sensor is expected to be the only sensor on board for this voyage, and we are thrilled to have this opportunity to showcase what our sensors are capable of.

Artist’s illustration of Artemis astronauts working on the Moon.
(Photo courtesy of NASA)
The Artemis III mission will mark the first return of astronauts to the lunar surface since Apollo 17 in 1972. The LEMS is one of the first payloads determined for Artemis III; it is a compact, autonomous seismometer suite that can carry out continuous, long-term monitoring of the seismic environment. Our sensors will be utilized to detect deep and shallow moonquakes. Along with two other instruments, the goal of this mission is to collect data regarding the lunar environment, lunar interior, and how to sustain a long-duration human presence on the Moon. A synthesis of this data will help prepare NASA to one day send astronauts to Mars!
With such a significant project, this is a collaboration among multiple entities. The following is a breakdown of who’s involved and their responsibilities:
- NASA Goddard Center: Building the LEMS module providing power, data acquisition, and communication. Also responsible for integrating the seismometers into the module.
- University of Arizona: Overseeing the seismometer and scientific aspects.
- University of Maryland: Principal investigators for the project.
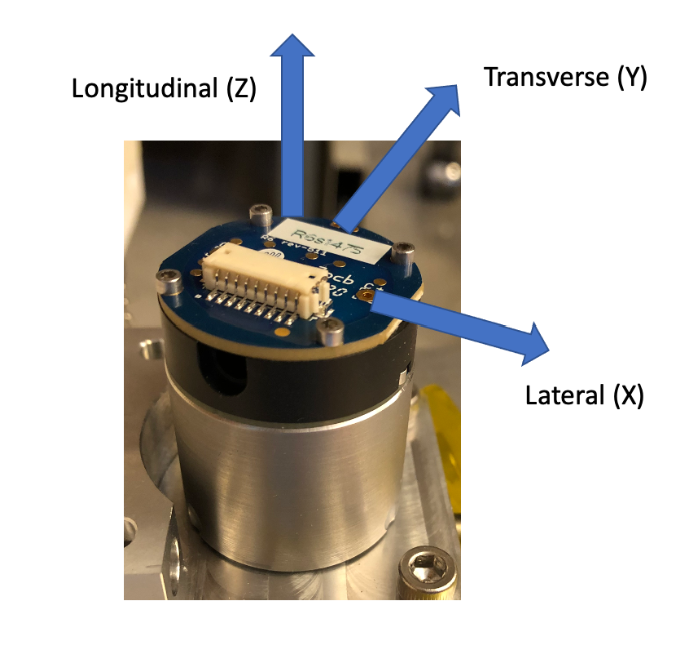
- Silicon Audio: Building very-broad-band (VBB) and short-period (SP) seismometers, including the engineering training unit (ETU) and flight unit.

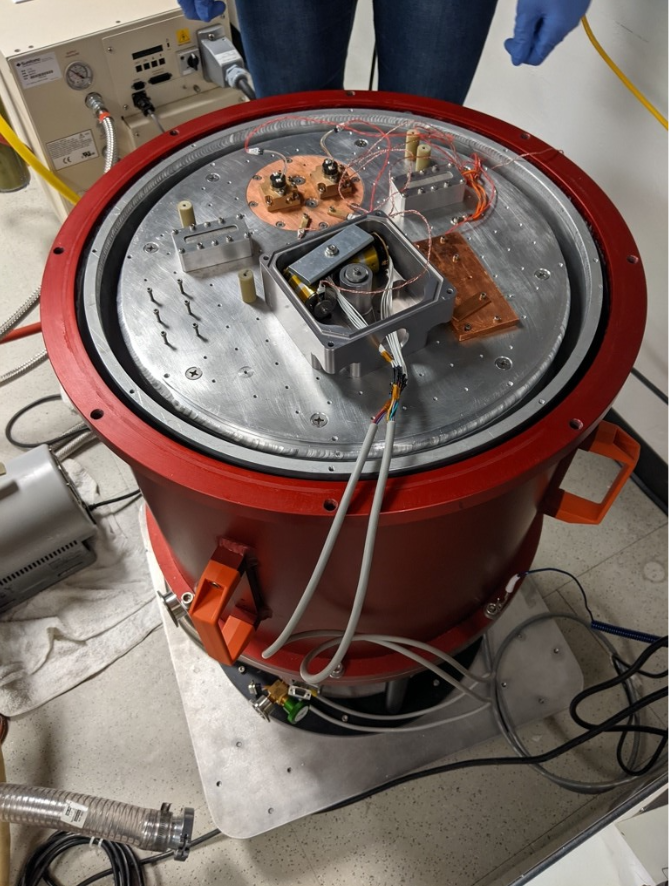
With a currently scheduled launch date of 2026, we have already been hard at work preparing this sensor for liftoff. Technology Readiness Levels (TRL) are a systematic metric used by NASA to assess the maturity of any system in the context of research and development. As mentioned in our previous newsletter, our commercial optical seismometers have a shock tolerance up to 1500 G, which is three times more than other available seismometers with similar performance. With that, we have achieved successful results in our shock and vibration tests, indicating that our sensors have passed TRL-6.


We can’t wait to move forward with this project and are thrilled that the only lunar seismometer for this mission will be made right here in Austin, TX.
Want to read more about this mission?
Check out these articles published by our collaborators!
- NASA Selects First Lunar Instruments for Artemis Astronaut Deployment – NASA
- NASA Goddard to Build Quake Detector for Artemis III Moon Landing – NASA
- Humans will again set foot on the moon; this time, they’ll have UArizona science in tow | University of Arizona News
- NASA Selects UMBC-led Lunar Instrument For Implementation On Artemis III Moon Landing Mission – UMBC: University Of Maryland, Baltimore County